 您當前所在位置:首頁 > 産品中心 > 特種(zhǒng)機器人
您當前所在位置:首頁 > 産品中心 > 特種(zhǒng)機器人


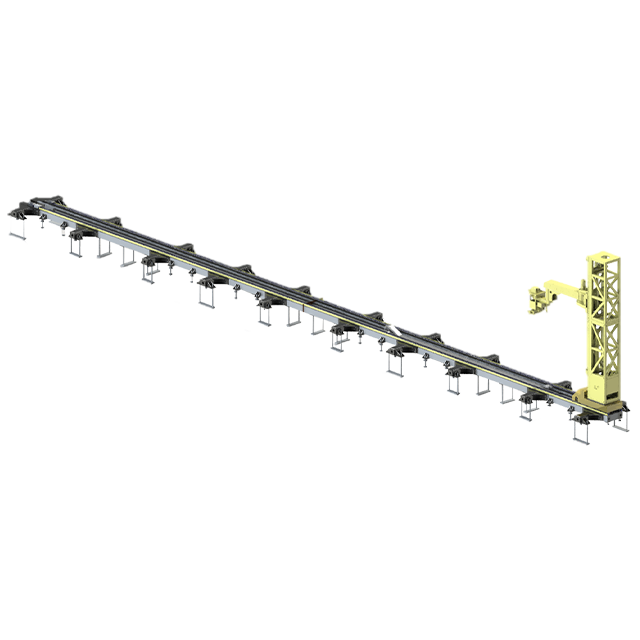


傳統水平多關節機器人具有四個軸和四個運動自由度,在X、Y方向(xiàng)具有順從性,而在Z軸方向(xiàng)上具有良好(hǎo)的剛度,大臂和小臂是串聯兩(liǎng)杆結構,類似人的手臂,可以伸進(jìn)有限的空間進(jìn)行作業,然後(hòu)收回。
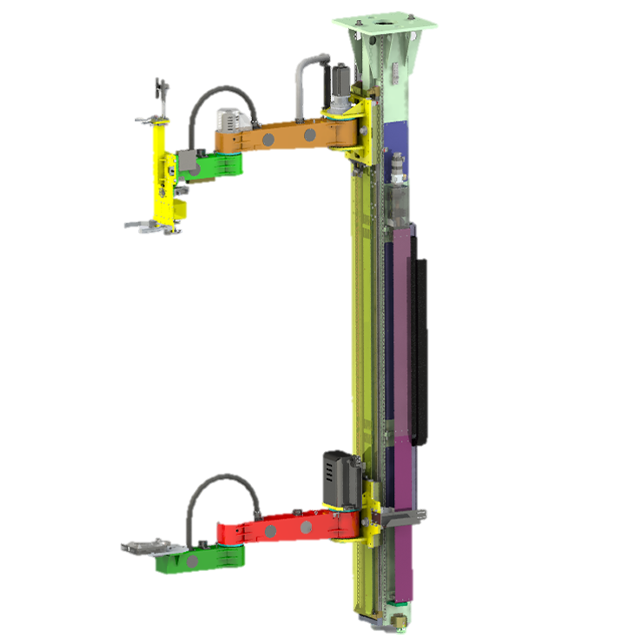
重載水平多關節機器人包含伺服驅動的大臂和小臂,可在程序控制下進(jìn)行柔性的類似人手臂的動作,該動作主要在水平面(miàn)方向(xiàng)展開(kāi),故將(jiāng)其歸類爲SCARA,命名爲重載水平多關節機器人。


約1米(需根據各對(duì)接設備确定)
約1米(需根據各對(duì)接設備确定)
±90°
±115°
30~40m/min
8~12m/min
8~12m/min
8~12m/min
機械手:1000kg (Max)





